Overview
A complete simulation of a 3-floor electronic dumbwaiter (food lift) controlled by an 8051 microcontroller. This project demonstrates low-level logic implementation using Assembly language to manage motor direction, sensor inputs, and safety protocols.
Key Features
- Multi-Floor Logic: Intelligent routing to Ground, 1st, and 2nd floors.
- Motor Drive: L293D-based bidirectional motor control (CW/CCW) with PWM speed regulation.
- Safety Interlocks:
- Weight Limit: Load cell integration to prevent operation when overloaded (>250kg).
- Door Sensors: Prevents movement if any service door is open.
- Fault Detection: Automated timeout alarms if the lift triggers a “stuck” condition.
System Design
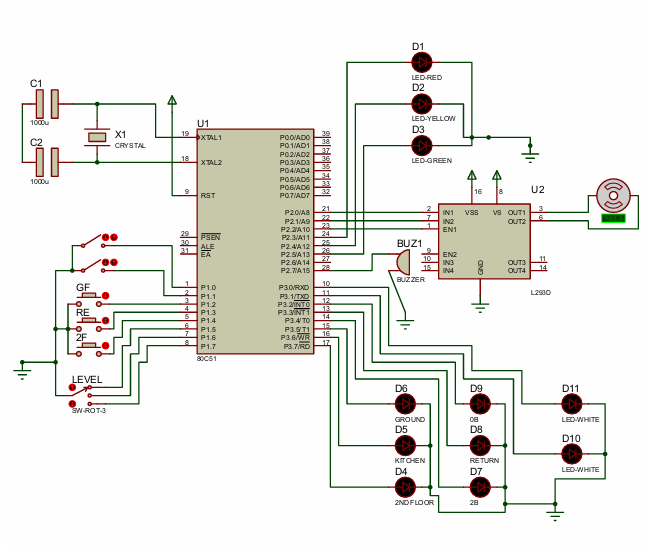
The system was fully simulated in Proteus to validate the logic before implementation. The design includes a comprehensive schematic integrating the 8051 MCU, L293D driver, and sensor inputs.
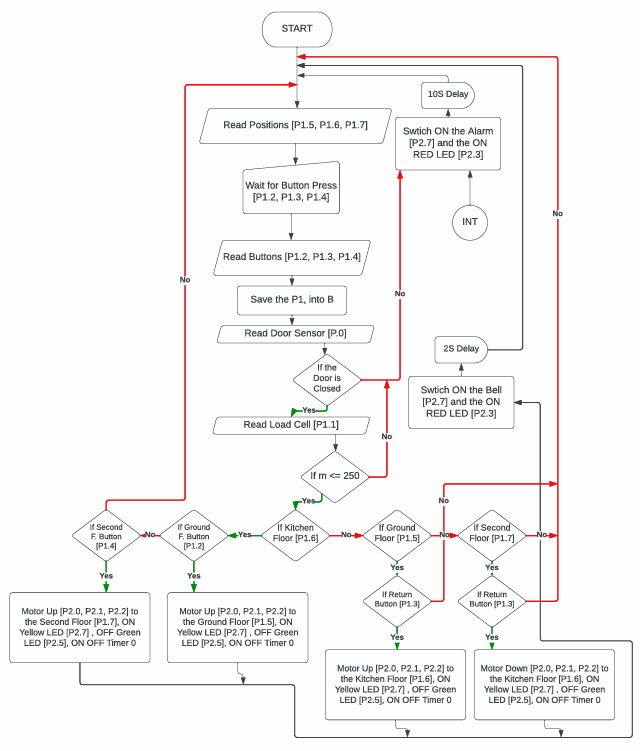
Control Logic
The logic is written in optimized Assembly, utilizing hardware timers for precise delay checking and state management. The flowchart below illustrates the main control loop.
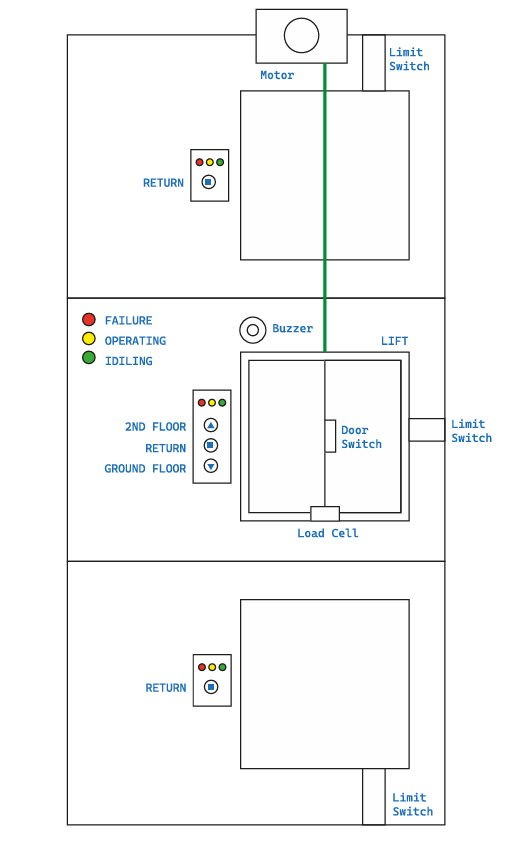
Architecture & Layout
The system follows a modular block architecture, separating the control unit, driver logic, and sensor array.
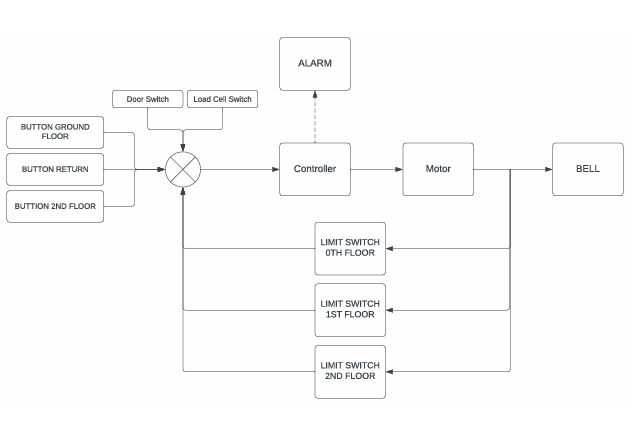
System Architecture
- Input Layer: Floor call buttons, limit switches, and safety sensors.
- Processing: 8051 MCU handling interrupt-driven events and main polling loops.
- Output: Motor driver signals and status LED indicators (Green/Yellow/Red).